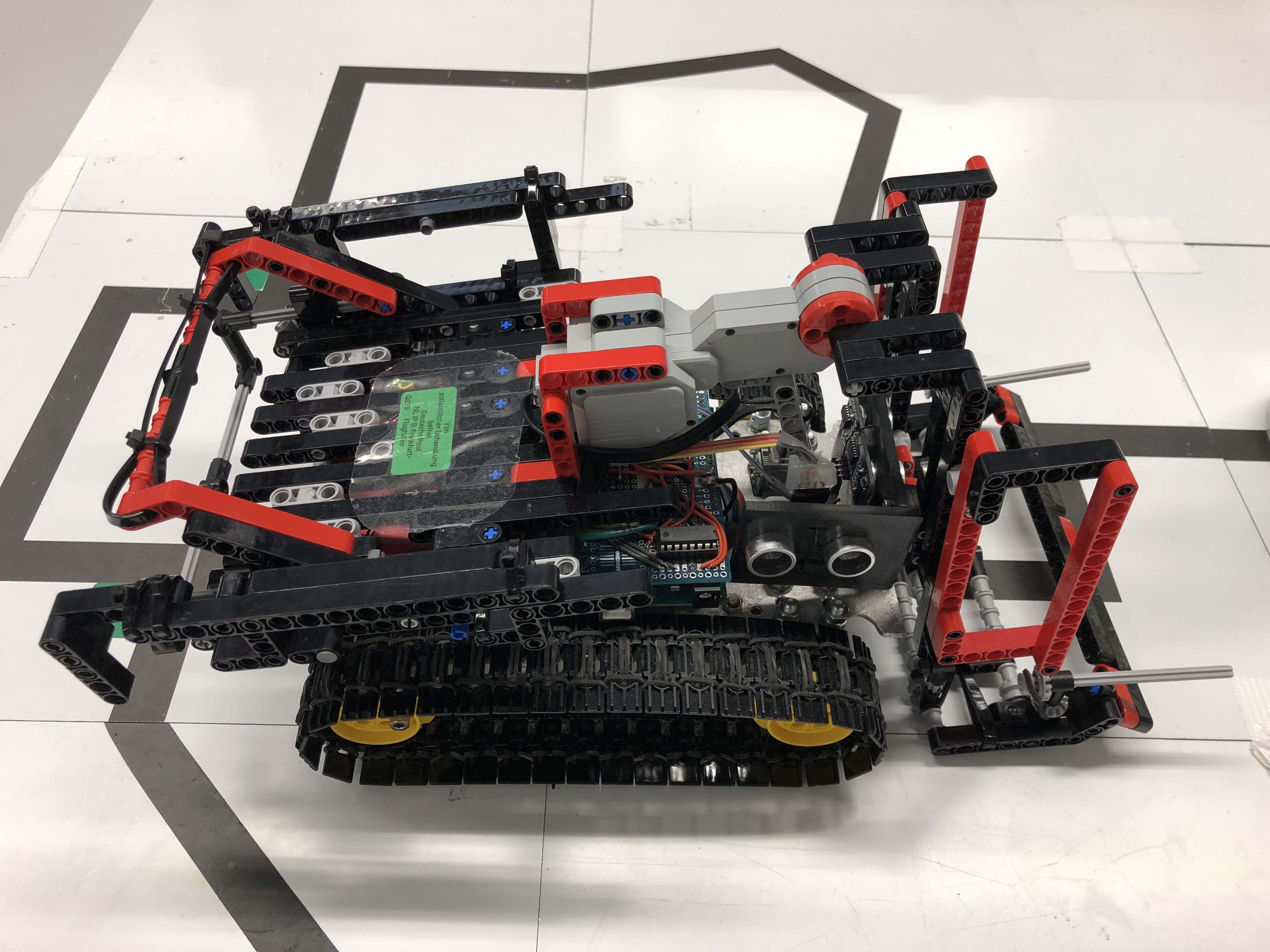
In 2019, we utilized the QTR-8RC light sensor array to determine the robot's relative position in relation to the line, complemented by two LEGO color sensors for intersection detection. To interface the color sensors with the Arduino and control the large LEGO motor responsible for lifting victims, we employed an EvShield. In the pursuit of constructing a compact and efficient robot, we opted for the Pololu 20d motors, which offered simliar performance while significantly reducing the overall size compared to traditional LEGO motors. To achieve a sturdy yet lightweight chassis, we utilized aluminum material, but we also used our 3D printer to craft custom mounts tailored to our specific requirements.