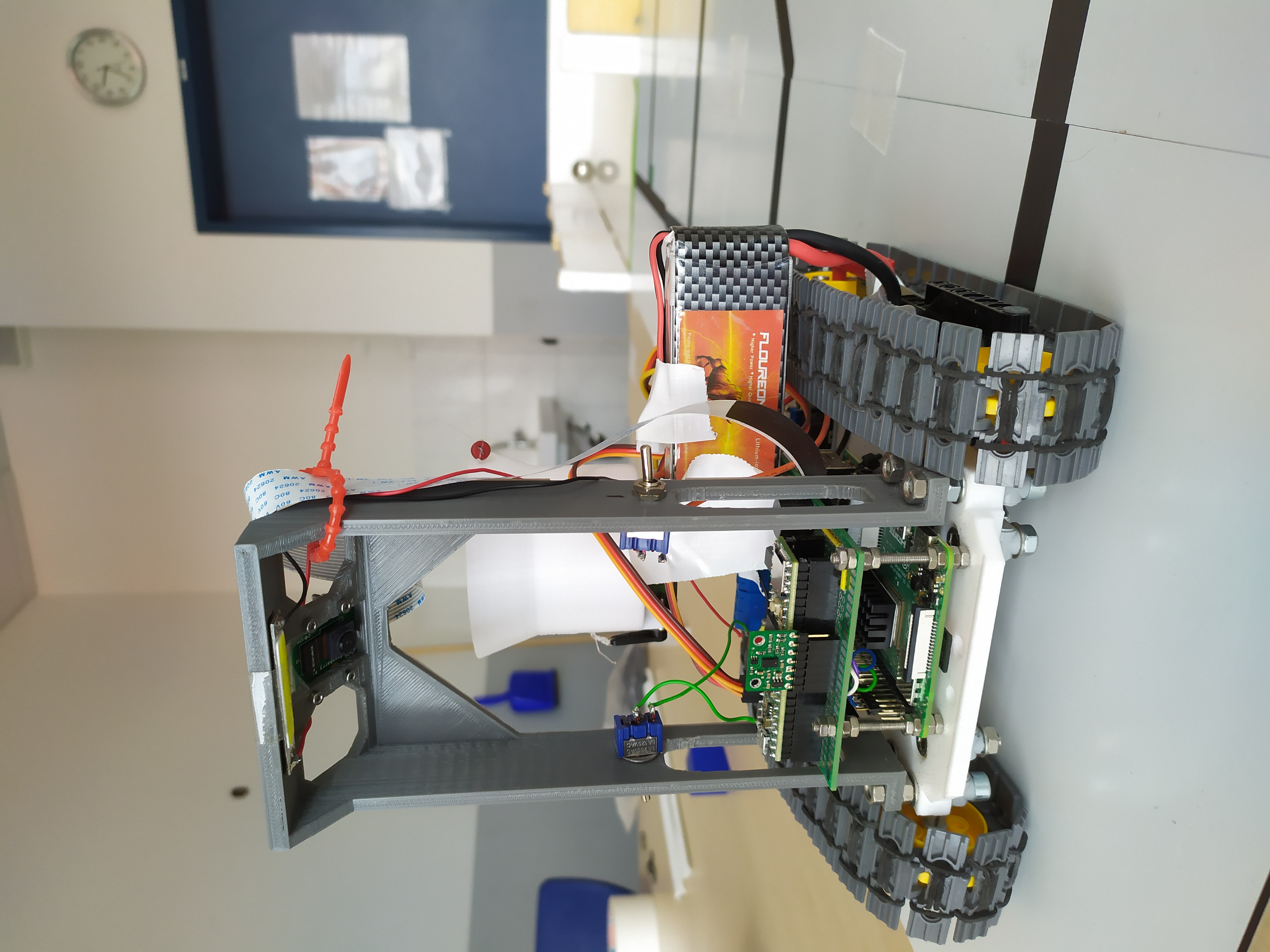
In 2021, we employed a Raspberry Pi in conjunction with a Teensy microcontroller, utilizing UART connection. The Pi was tasked with processing the camera frames, while the Teensy was responsible for driving the motors. Initially, we employed a chain chassis, which proved highly effective in navigating ramps and speed bumps compared to subsequent robot models. However, due to the camera's front-mounted position, distant from the center of rotation, we eventually transitioned to a more versatile chassis design, enabling turning around the front axis. More information about the robot can be found in our TDP.