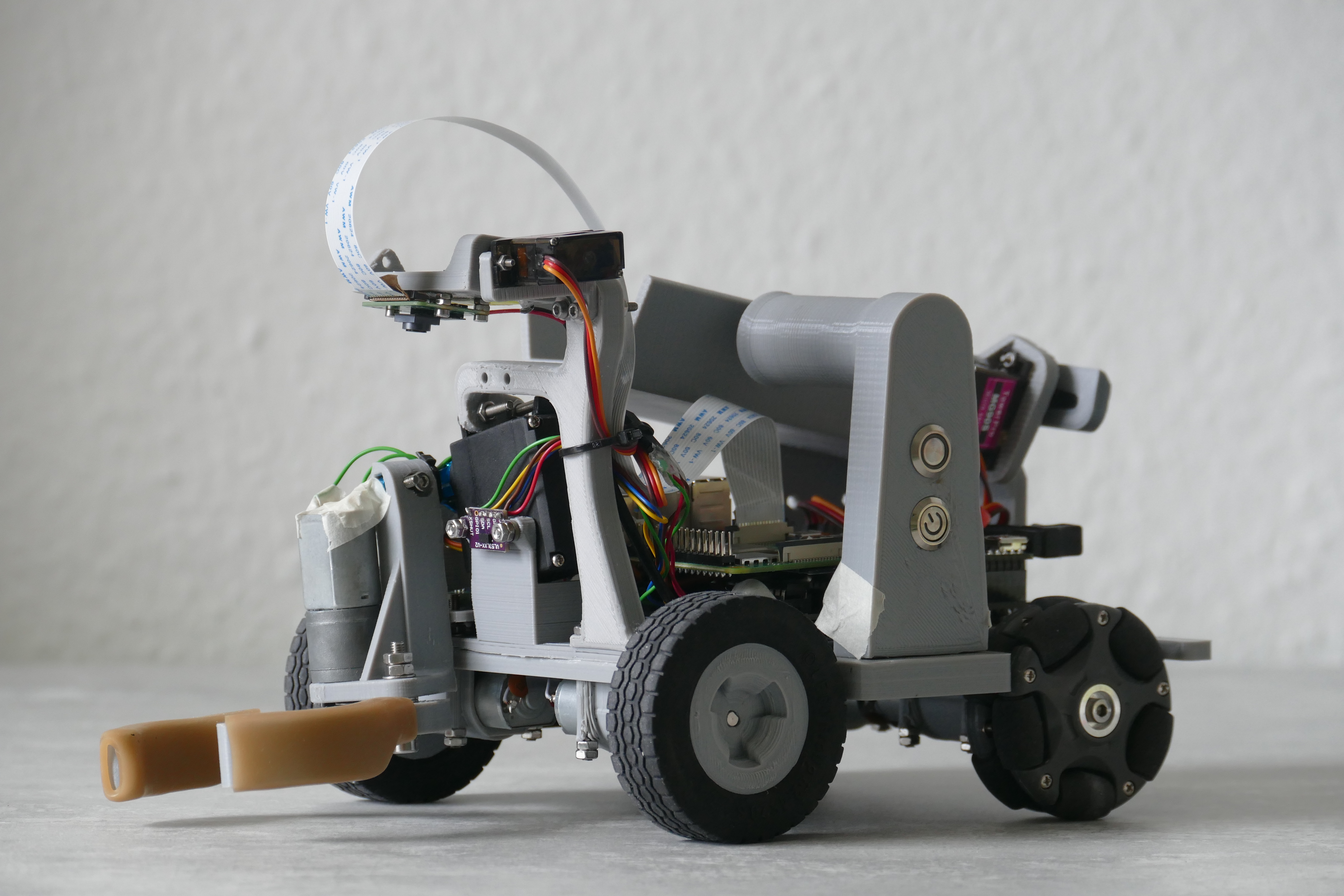
The primary program was run on a Raspberry Pi, and the motor control was handled by an Arduino Nano that was USB-connected to the Pi. Basically, the Pi connects with the Nano whenever it requires a sensor value or wants to control a motor, and the Pi handles all the computation and program flow. By doing so, we could leverage the strengths of both platforms as the Nano is adept at working with a wide range of sensors and actuators while the Pi has plenty of computation power. We used a camera both during line following and in the evacuation zone in addition to the two distance sensors that were used for obstacle detection and in the evacuation zone. Additional details regarding the hardware and software of this years robot can be found in our TDP and in our GitHub repository.